Tactile Dexterity: Manipulation Primitives with Tactile Feedback
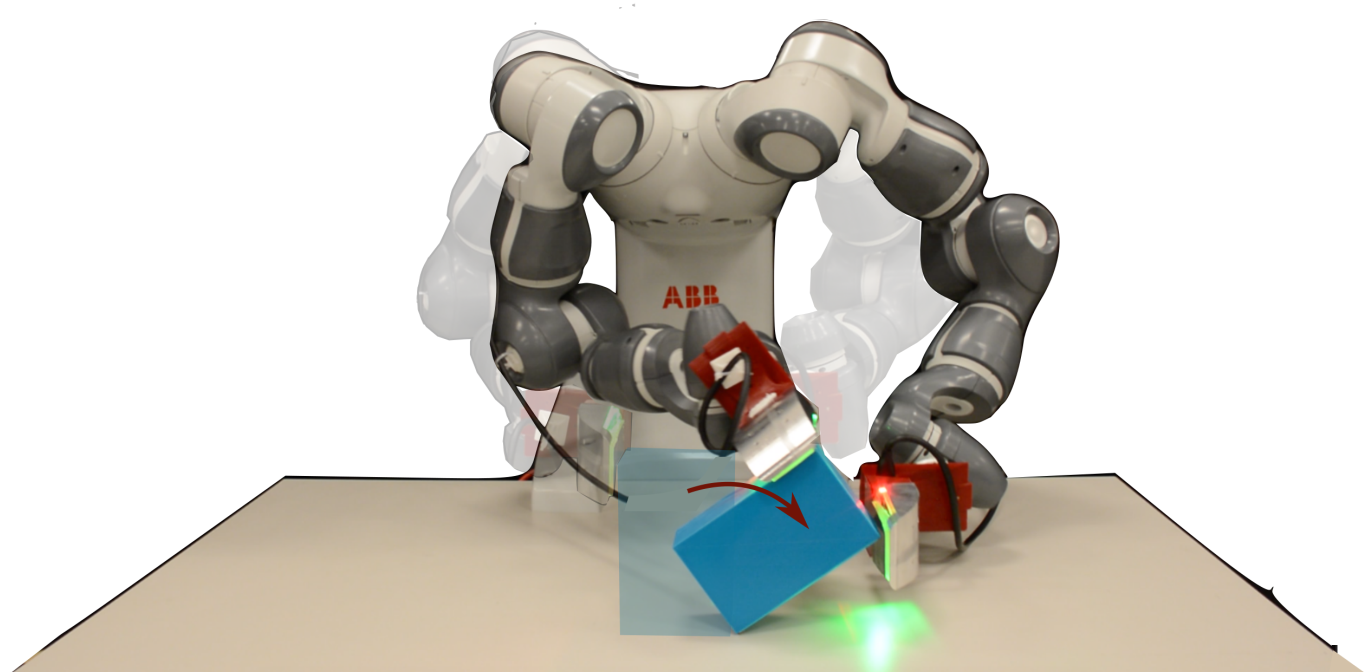
Tactile dexterity is an approach to dexterous manipulation that plans for robot/object interactions
that render interpretable tactile information for control. We develop closed-loop tactile controllers for dexterous manipulation with dual-arm robotic palms
with the ability to manipulate an object from an initial pose to a target pose on a flat surface while correcting for external perturbations and uncertainty
in the initial pose of the object. We validate the approach with an ABB YuMi dual-arm robot and demonstrate the ability of the tactile controller to handle external perturbations.
Key to this formulation is the decomposition of manipulation plans into sequences of manipulation primitives with simple mechanics and efficient planners.
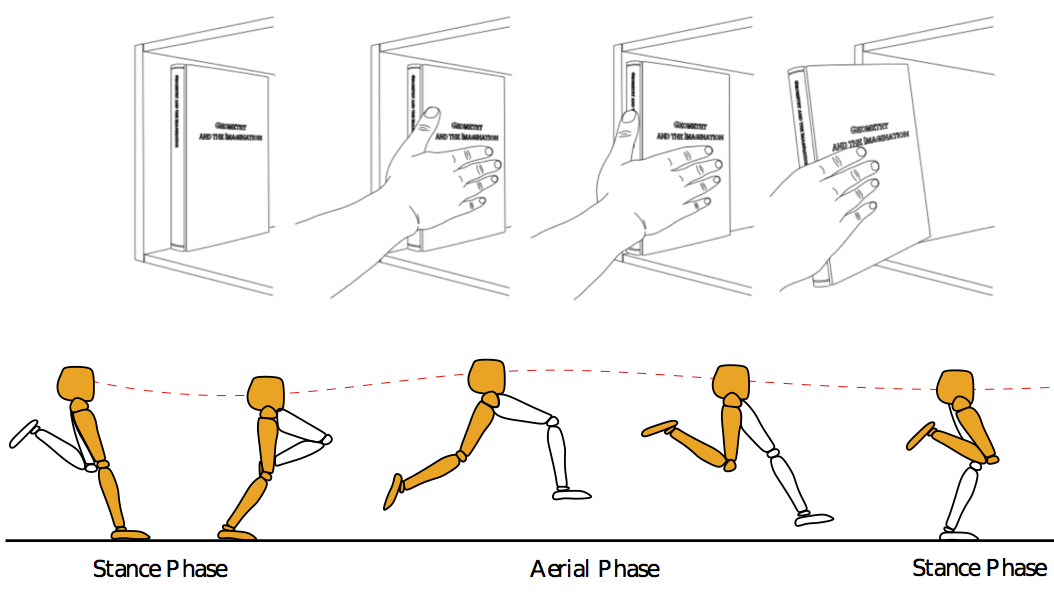
We investigate investigates real-time control strategies
for dynamical systems that involve frictional contact interactions.
Hybridness and underactuation are key characteristics of these systems
that complicate the design of feedback controllers.
Our results show that a Model Predictive Control approach used in tandem
with integer programming offers a powerful solution to capture the dynamic
constraints associated with the friction cone as well as the hybrid nature
of contact.
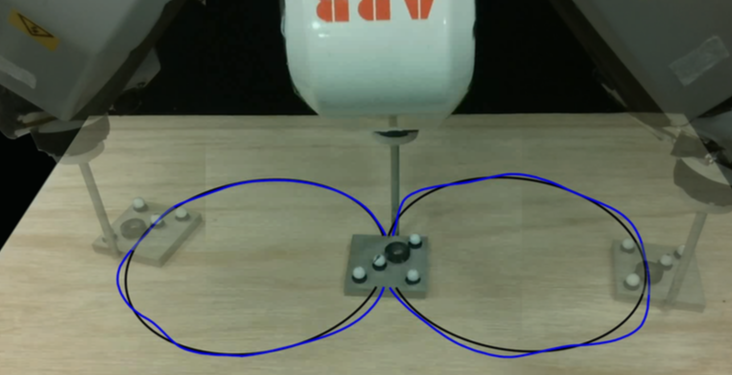
This paper explores the data-complexity required to control manipulation tasks with a model-based approach,
where the model is learned from data. We employ this methodology to the problem of pushing an object on a planar
surface, and find that we can design effective control policies with small data requirements
(less than $10$ datapoints) while achieving accurate closed-loop performance.
</p>
During the period 2015-2017, I participated in the Amazon Robotics Challenge (ARC) as part of team MIT-Princeton.
The challenge involved developing a robotic system capable of recognizing and grasping novel objects in cluttered
environments. Our approach made use of an object agnostic deep learning framework that directly maps visual
observations to planned robot motion. This work has led to a
1st place in the 2017 stowing task challenge as well as a 2018 Amazon Best System Paper Award.
</p>
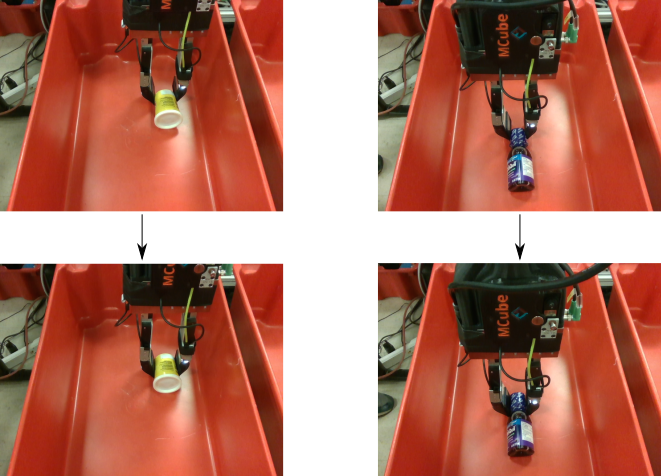
In this project, we develop tactile reflexes, giving robots the ability to make grasp adjustments immediately
upon making contact with an object. Tactile information is used to assess in real-time
the quality of a grasp and predict failures preemptively and to design a controller able to perform local grasp
adjustments, where grasp are improved directly upon making initial touch with an object.
</p>
Hybrid Feedback Control For Contact Interactions
Data-Efficient Control for Planar Manipulation
Autonomous Grasping
Tactile Regrasping